roiAlign
1, 原理
2, 例子
原理
首先介绍一下RoIPooling, 它的目的是为了从RPN网络确定的ROI中导出较小的特征图(a small feature map,eg 7x7),ROI的大小各不相同,但是RoIPool后都变成了7x7大小。 RPN网络会提出若干RoI的坐标以[x,y,w,h]表示,然后输入RoI Pooling,输出7x7大小的特征图供分类和定位使用。
问题就出在RoI Pooling的输出大小是7x7上,如果ROI网络输出的RoI大小是8*8的,那么无法保证输入像素和输出像素是一一对应,
首先他们包含的信息量不同(有的是1对1,有的是1对2),其次他们的坐标无法和输入对应起来(1对2的那个RoI输出像素该对应哪个输入像素的坐标?)。这对分类没什么影响,但是对分割却影响很大。
RoIAlign的输出坐标使用插值算法得到,不再量化;每个grid中的值也不再使用max,同样使用差值算法。
例子

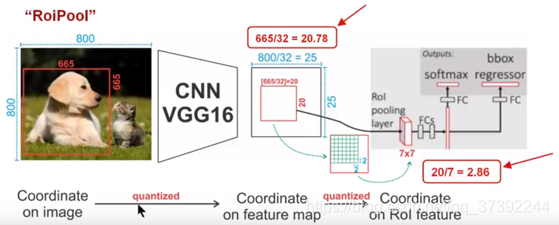
如上图所示:为了得到固定大小(7X7)的feature map,我们需要做两次量化操作:
1)图像坐标 —> feature map坐标,
2)feature map坐标 —> ROI feature坐标。
我们来说一下具体的细节,如图我们输入的是一张800x800的图像,在图像中有两个目标(猫和狗),狗的BB大小为665x665,经过VGG16网络后,我们可以获得对应的feature map, 如果我们对卷积层进行Padding操作,我们的图片经过卷积层后保持原来的大小,但是由于池化层的存在,我们最终获得feature map 会比原图缩小一定的比例,这和Pooling层的个数和大小有关。
在该VGG16中,我们使用了5个池化操作,每个池化操作都是2Pooling,因此我们最终获得feature map的大小为800/32 x 800/32 = 25x25(是整数), 但是将狗的BB对应到feature map上面,我们得到的结果是665/32 x 665/32 = 20.78 x 20.78,结果是浮点数,含有小数,但是我们的像素值可没有小数, 那么作者就对其进行了量化操作(即取整操作),即其结果变为20 x 20,在这里引入了第一次的量化误差; 然而我们的feature map中有不同大小的ROI,但是我们后面的网络却要求我们有固定的输入,因此,我们需要将不同大小的ROI转化为固定的ROI feature,在这里使用的是7x7的ROI feature, 那么我们需要将20 x 20的ROI映射成7 x 7的ROI feature,其结果是 20 /7 x 20/7 = 2.86 x 2.86,同样是浮点数,含有小数点, 我们采取同样的操作对其进行取整吧,在这里引入了第二次量化误差。
其实,这里引入的误差会导致图像中的像素和特征中的像素的偏差,即将feature空间的ROI对应到原图上面会出现很大的偏差。 原因如下:比如用我们第二次引入的误差来分析,本来是2,86,我们将其量化为2,这期间引入了0.86的误差, 看起来是一个很小的误差呀,但是你要记得这是在feature空间,我们的feature空间和图像空间是有比例关系的,在这里是1:32, 那么对应到原图上面的差距就是0.86 x 32 = 27.52。这个差距不小吧,这还是仅仅考虑了第二次的量化误差。这会大大影响整个检测算法的性能,因此是一个严重的问题。

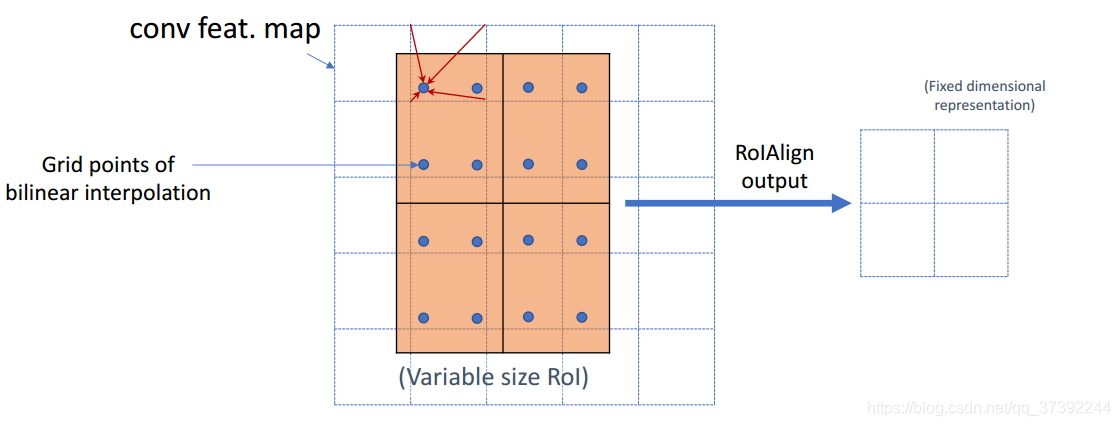
如上图所示,为了得到为了得到固定大小(7X7)的feature map,ROIAlign技术并没有使用量化操作, 即我们不想引入量化误差,比如665 / 32 = 20.78,我们就用20.78,不用什么20来替代它,比如20.78 / 7 = 2.97,我们就用2.97,而不用2来代替它。 这就是ROIAlign的初衷。 那么我们如何处理这些浮点数呢,我们的解决思路是使用“双线性插值”算法。 双线性插值是一种比较好的图像缩放算法, 它充分的利用了原图中虚拟点(比如20.56这个浮点数,像素位置都是整数值,没有浮点值)四周的四个真实存在的像素值来共同决定目标图中的一个像素值, 即可以将20.56这个虚拟的位置点对应的像素值估计出来。
如下图所示,蓝色的虚线框表示卷积后获得的feature map, 黑色实线框表示ROI feature,最后需要输出的大小是2x2, 那么我们就利用双线性插值来估计这些蓝点(虚拟坐标点,又称双线性插值的网格点)处所对应的像素值, 最后得到相应的输出。这些蓝点是2x2Cell中的随机采样的普通点, 作者指出,这些采样点的个数和位置不会对性能产生很大的影响,你也可以用其它的方法获得。 然后在每一个橘红色的区域里面进行max pooling或者average pooling操作,获得最终2x2的输出结果。我们的整个过程中没有用到量化操作,没有引入误差, 即原图中的像素和feature map中的像素是完全对齐的,没有偏差,这不仅会提高检测的精度,同时也会有利于实例分割。
参考
https://blog.csdn.net/qq_37392244/article/details/88844681